网站首页 互联网 > 正文
RoboBee看着墙或撞上玻璃盒子的景象可能引起了哈佛大学约翰保尔森工程和应用科学学院(SEAS)哈佛微型机器人实验室研究人员的恐慌,但仅此而已。
SEAS和怀斯生物侦察工程研究所的研究人员开发了一种弹性机器人机器人,这种机器人由柔软的人造肌肉驱动,可以撞击墙壁、摔倒在地板上并与其他机器人碰撞而不会损坏。这是第一个由软执行器驱动的微型机器人,可以实现受控飞行。
SEAS前研究生、博士后研究员、论文第一作者陈玉峰说:“在微型机器人领域,移动机器人因为具有很高的韧性,变得非常强大。”“然而,这一领域的许多人一直怀疑它们能否用于飞行机器人,因为这些执行器的功率密度根本不够高,而且众所周知它们很难控制。我们的执行器具有足够高的功率密度和可控性,可以实现悬停飞行。”
该研究发表于《自然》。
为了解决功率密度问题,研究人员基于扩展塔尔材料教授大卫克拉克实验室开发的电动软执行器。这些软致动器由绝缘材料和具有良好绝缘性能的弹性体制成,当施加电场时,它们会变形。
通过提高电极的导电性,研究人员可以以500赫兹的速度操作执行器,这相当于以前在类似机器人中使用的刚性执行器。
当处理软致动器时,另一个挑战是系统倾向于弯曲并变得不稳定。为了解决这一挑战,研究人员建造了一个带有垂直约束线的轻质机身,以防止致动器弯曲。
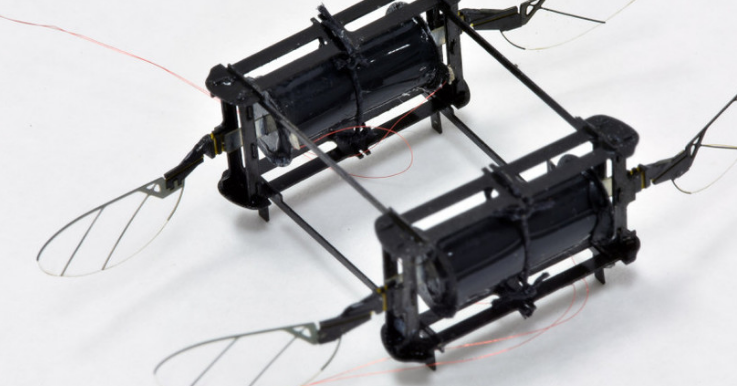
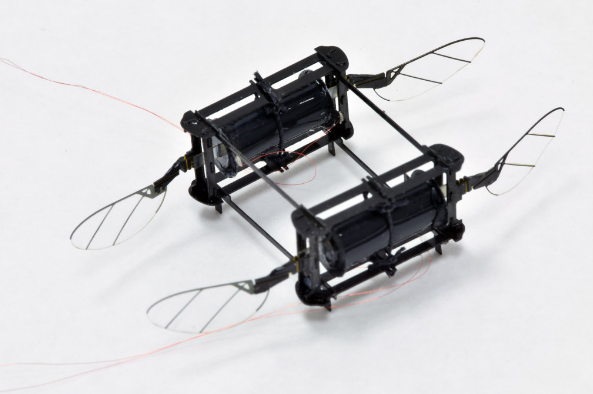
在这些小型机器人中,软致动器可以很容易地组装和更换。为了展示各种飞行能力,研究人员建造了几种不同类型的软机器人舱。两翼可以从地面起飞,但没有其他控制。四翼和双作动器模型可以在混乱的环境中飞行,一次飞行可以克服多次碰撞。
伊丽莎白法雷尔赫尔布林是SEAS的一名前研究生,也是该论文的合著者之一,她说:“小型低质量机器人的一个优势是它们抵御外部冲击的能力。”“软执行器提供了额外的好处,因为它们比传统的执行策略更能吸收冲击。这将在潜在的应用中派上用场,比如在瓦砾中飞行执行搜索和救援任务。”
八翼四作动器模型展示的是受控悬停飞行,这是微型机器人首次利用软实力进行悬停飞行。
接下来,研究人员的目标是提高软动力机器人的效率,这仍然远远落后于传统的飞行机器人。
“具有肌肉样特征和电激活功能的软致动器对机器人来说是一个巨大的挑战,”SEAS大学工程和应用科学教授、威斯生物灵感工程学院核心教师罗伯特伍德说。“如果我们能设计出高性能的人工肌肉,那么天空就是我们能制造的机器人的极限。”
哈佛大学技术开发办公室已经保护了与该项目相关的知识产权,并正在探索商业化机会。
郑重声明:本文版权归原作者所有。转载文章只是为了传播更多的信息。如果作者信息标注有误,请第一时间联系我们修改或删除。谢谢你。
免责声明: 本文由用户上传,如有侵权请联系删除!
猜你喜欢:
- 2023-07-05 被遗忘的国度 恶魔之石心得(遗忘国度:恶魔之石)
- 2023-07-05 怎样做到勤能补拙(勤能补拙的方法)
- 2023-07-05 手机上在哪里查询生育险(手机上在哪里查询生育险余额)
- 2023-07-05 跑步膝盖疼的原因及解决方法(跑步膝盖疼的原因及解决方法图片)
- 2023-07-05 山羊画什么脚印(山羊画什么脚印像什么)
- 2023-07-05 设计图:君王板甲护腕如何获得?(君王板甲腰带图纸获取办法)
- 2023-07-05 电脑如何恢复出厂设置win7(笔记本电脑如何恢复出厂设置win7)
- 2023-07-05 DOTA中的骷髅王出装推荐(dota2骷髅王最强出装)
最新文章:
- 2023-07-05 上海搬家公司价格查询怎样进行普通搬家多少钱?(上海搬家公司价格表一览)
- 2023-07-05 电脑网页打开很慢怎么办(电脑网页打开很慢怎么办有时还打不开)
- 2023-07-05 拳皇WingEx1.0隐藏技能怎么用(拳皇wingex1.02隐藏技能)
- 2023-07-05 《名将传说》新手攻略5大职业特色技能详解(《名将传说》新手攻略5大职业特色技能详解介绍)
- 2023-07-05 如何锻炼口才(如何锻炼口才和思维能力)
- 2023-07-05 sumifs函数的使用方法(sumifs函数的使用方法日期)
- 2023-07-05 win10回收站图标不能正常显示怎么办(windows10只有回收站图标)
- 2023-07-05 长沙周边一日游 农家乐农的传人值得你去一趟(长沙农家乐好去处)
- 2023-07-05 联想a789刷机教程 最简单的线刷方法等你分享
- 2023-07-05 育苗块怎么用(育苗块怎么使用)
- 2023-07-05 瑜伽冥想有哪些好处(瑜伽冥想有哪些好处呢)
- 2023-07-05 海鱼的做法大全(海鱼的做法大全视频)
- 2023-07-05 招商银行缴纳学费(招商银行缴纳学费步骤)
- 2023-07-05 qq空间怎么添加音乐(QQ空间如何添加音乐)
- 2023-07-05 如何在淘宝上开店(淘宝店铺怎么开)
- 2023-07-05 女孩子喜欢什么礼物(给女孩子送什么礼物比较好)