网站首页 科技 > 正文
布里斯托大学的研究人员最近训练了一个基于深度神经网络的模型来收集关于三维物体的触觉信息。在《IEEE机器人与自动化》杂志发表的一篇论文中,他们将深度学习技术应用于具有感知功能的机器人指尖,发现这项技术可以推断出更多关于周围环境的信息。
进行这项研究的研究人员之一内森莱波拉教授告诉TechXplore:“我们的总体想法是,当控制机器人与周围环境发生物理交互时,人工重现触摸感觉。”“人类这样做是无意的,例如,当他们用手指在一个物体上刷以感知其形状时。然而,背后的计算却出奇的复杂。通过将深度学习应用于人类,我们已经在机器人上实现了这种类型的物理交互。类似于人类皮肤的指尖。”
近十年来,莱波拉教授一直试图重塑机器人的触觉。在他之前的作品中,他使用了更传统的机器学习技术,比如概率分类器。然而,他发现这些技术只允许机器人执行非常基本的任务,比如用缓慢的敲击动作感受简单的2D形状。
Lepora教授说:“这篇新论文的突破之处在于,我们在自然界复杂物体上使用的方法是三维工作的,使指尖像人类一样滑动。”“由于过去几年在深度学习方面的进步,我们能够做到这一点。”
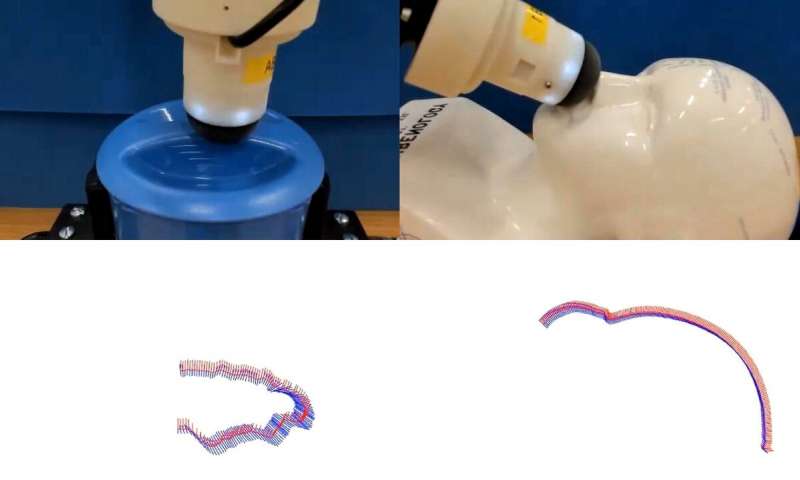
为机器人提供触觉可以帮助控制他们的手和指尖,这样他们就可以估计物体或与他们接触的物体部分的形状和纹理。例如,当机器人沿着表面上的边缘滑动时,机器人可能能够估计边缘的角度并相应地移动其机器人手指。
莱波拉教授说:“深度学习使我们能够构建从感官数据到表面特征(如边缘角度)的可靠地图。”“这很困难,因为在表面上滑动像人一样柔软的指尖会扭曲收集的数据。过去,我们无法将这种失真与表面形状分开,但在这项工作中,我们通过深度卷积成功地训练了神经网络,其中包括触觉数据失真的示例,这使我们能够在几分之一度的范围内生成精确的表面角度估计。”

通过收集精确的表面角度估计,由Lepora教授和他的同事设计的深度学习技术可以更好地控制机械手的指尖。未来,这种方法可以为机器人提供与人类相似的物理灵巧性,使其能够根据与其交互的物体有效地调整抓取和操纵策略。
到目前为止,研究人员已经通过将其与单个机器人指尖集成来证明其技术的有效性。但未来可以应用到软体机器人的所有指尖和四肢,使其可以像人类一样操作工具,完成操控任务。这可能最终为开发更高效的机器人用于各种环境铺平道路,包括设计用于完成家务、在农场采摘农产品或满足医疗机构患者需求的机器人。
莱波拉教授说:“我的实验室还制作了3D打印指尖和完整的机械手,带有触觉传感,可以复制人类的触觉。”“在接下来的研究中,我们打算利用人工智能的方法(如本文提出的方法)来研究与整个触觉机器人手的智能交互,这将使机器人能够更有效地处理工具或其他物体。”
郑重声明:本文版权归原作者所有。转载文章只是为了传播更多的信息。如果作者信息标注有误,请第一时间联系我们修改或删除。谢谢你。
标签:人工智能机器人。
免责声明: 本文由用户上传,如有侵权请联系删除!
- 上一篇: 百度寻找量子AI优势
- 下一篇: 实用案例研究和专家分析以及更多保险AI和美国分析
猜你喜欢:
- 2023-07-05 酸梅四物饮怎么做(酸梅饮料怎么做的)
- 2023-07-05 英雄联盟手游光明哨兵活动任务怎么做(英雄联盟手游光明哨兵活动任务怎么做视频)
- 2023-07-04 叠杯子教程玩法(叠杯子教程玩法6个)
- 2023-07-04 微信怎么直接向手机号转账(微信怎么直接向手机号转账了)
- 2023-07-04 如何学习蹲踞式跳远:[1]助跑与起跳(蹲踞式跳远助跑的动作要领)
- 2023-07-04 360安全浏览器和极速浏览器哪个好(360安全浏览器和360极速浏览器哪个更好)
- 2023-07-04 mac地址怎么查(mac地址怎么查命令)
- 2023-07-04 怎么在去哪儿网上订酒店?(网上订酒店在哪里)
最新文章:
- 2023-07-05 易语言做qq强制聊天软件(Qq强制聊天软件)
- 2023-07-05 新倩女幽魂端游一条龙任务之大盗宝藏副本玩法(倩女大盗宝藏攻略)
- 2023-07-05 CDR怎么填充多种颜色渐变(cdr渐变色填充)
- 2023-07-05 页边距怎么设置(页边距怎么设置在哪里Word)
- 2023-07-05 win10兼容模式怎么设置在哪(win10兼容模式怎么设置在哪里)
- 2023-07-05 网易126邮箱如何设置黑名单?(网易邮箱126解除黑名单)
- 2023-07-05 英雄联盟手游凯南怎么出装(英雄联盟手游凯南怎么出装备)
- 2023-07-05 点点赚怎么答卷赚钱攻略(赚点答题技巧)
- 2023-07-05 自己做电脑系统最简单的方法!(自己做电脑系统最简单的方法是什么)
- 2023-07-05 快手放电影怎么放啊(快手放电影怎么放)
- 2023-07-05 QQ如何更换密保手机(qq如何更换密保手机号申诉不记得手机号了)
- 2023-07-05 win10默认安装路径在哪里设置如何修改安装路径(windows10修改默认安装路径)
- 2023-07-05 万网域名证书在哪里?怎么打印万网域名证书?(如何打印域名证书)
- 2023-07-05 原神神里绫人的圣遗物怎么获得(原神神里绫华平民圣遗物)
- 2023-07-05 微信转账0.01恶搞步骤(微信转账0.01恶搞文字)
- 2023-07-05 电子书营销技巧(电子书营销技巧与方法)